јтөҘЎўҫ«ЦВөДNACHI MZ07»ъЖчИЛДЈРОЈ¬ёч№ШҪЪ¶АІъҪЁДЈЈ¬ҝЙ»о¶ҜЎЈNACHI MZ07»ъЖчИЛЧоҝмҝЙҙп0.3ГлГҝ№ӨЧчҪЪЕДЈ¬ЦШёҙ¶ЁО»ҫ«¶ИОӘ0.02mmЈ¬УРР§ёәәЙОӘ7KGЎЈККУГУЪ°бФЛЎўВл¶вЎўҙтДҘЎўөгҪәөИЧФ¶Ҝ»Ҝ№ӨЧчЎЈ№жёс»ъЖчИЛРНәЕMZ07-01MZ07L-01MZ03EL-01№№Фм№ШҪЪРН№ШҪЪКэ6(5)6Зэ¶Ҝ·ҪКҪACЛЕ·ю·ҪКҪЧоҙу№ӨЧч·¶О§ұЫJ1Рэ»ШЎА2.97rad (ЎА170Ўг)J2З°әу-2.36 Ў« +1
Инјю°жұҫЈәSolidWorks
ОДјюёсКҪЈәSldprt/Sldasm
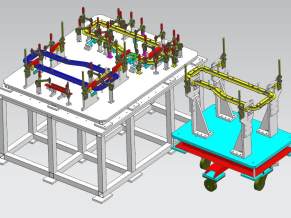
јтөҘЎўҫ«ЦВөДNACHI MZ07»ъЖчИЛДЈРОЈ¬ёч№ШҪЪ¶АІъҪЁДЈЈ¬ҝЙ»о¶ҜЎЈNACHI MZ07»ъЖчИЛЧоҝмҝЙҙп0.3ГлГҝ№ӨЧчҪЪЕДЈ¬ЦШёҙ¶ЁО»ҫ«¶ИОӘ0.02mmЈ¬УРР§ёәәЙОӘ7KGЎЈККУГУЪ°бФЛЎўВл¶вЎўҙтДҘЎўөгҪәөИЧФ¶Ҝ»Ҝ№ӨЧчЎЈ
№жёс
»ъЖчИЛРНәЕMZ07-01
MZ07L-01
MZ03EL-01
№№Фм№ШҪЪРН
№ШҪЪКэ6(5)6
Зэ¶Ҝ·ҪКҪACЛЕ·ю·ҪКҪ
Чоҙу
№ӨЧч·¶О§ұЫJ1Рэ»ШЎА2.97rad (ЎА170Ўг)
J2З°әу-2.36 Ў« +1.40rad (-135ЎгЎ« +80Ўг)
J3ЙППВ-2.37 Ў« +4.71rad
-2.43 Ў« +4.71rad
-2.71 Ў« +4.71rad
КЦНуJ4*3»ШЧӘ2ЎА3.32rad (ЎА190Ўг)
J5НдЗъЎА2.09rad (ЎА120Ўг)
J6»ШЧӘ1ЎА6.28rad (ЎА360Ўг)
ЧоҙуЛЩ¶ИұЫJ1Рэ»Ш7.85rad/s (450Ўг/s)5.24rad/s (300Ўг/s)
J2З°әу6.63rad/s (380Ўг/s)4.89rad/s (280Ўг/s)4.01rad/s (230Ўг/s)
J3ЙППВ9.08rad/s (520Ўг/s)6.28rad/s (360Ўг/s)
КЦНуJ4*3»ШЧӘ29.60rad/s (550Ўг/s)
J5НдЗъ9.60rad/s (550Ўг/s)
J6»ШЧӘ117.5rad/s (1000Ўг/s)
ҝЙ°бЦКБҝКЦНуІҝ7kg3.5kg
КЦНуИЭРн
ҫІёәәЙЕӨҫШJ4*3»ШЧӘ216.6NЎӨm6.0NЎӨm
J5НдЗъ16.6NЎӨm6.0NЎӨm
J6»ШЧӘ19.4NЎӨm2.9NЎӨm
КЦНуИЭРн
№ЯРФБҰҫШ*1J4*3»ШЧӘ20.47kgЎӨm20.12kgЎӨm2
J5НдЗъ0.47kgЎӨm20.12kgЎӨm2
J6»ШЧӘ10.15kgЎӨm20.03kgЎӨm2
О»ЦГ·ҙёҙҫ«¶И*2ЎА0.02mmЎА0.03mm
ЦЬО§ОВ¶И0Ў«45ЎгC
ЙиЦГМхјюөШГж°ІЧ°,ұЪ№Т°ІЧ°Ј¬Рьөх°ІЧ°,ЗгРұ°ІЧ°
ұҫМеЦКБҝ30kg32kg39kg
Чоҙу№ӨЧч°лҫ¶723mm912mm1102mm
ДН»·ҫіРФIP67 (·АіҫЎӨ·АөО
ЙкГчЈәДЪИЭАҙЧФУГ»§ЙПҙ«Ј¬ЦшЧчИЁ№йФӯЧчХЯЛщУРЈ¬ИзЙжј°ЗЦИЁОКМвЈ¬ЗлУлОТГЗБӘПөЈ¬ОТГЗҪ«ј°КұҙҰАнЈЎ