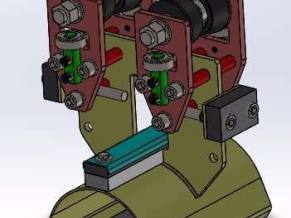
DTMC-0029-8型焊钳
点焊是一种高速、经济的连接方法。它适于制造可以采用搭接、接头不要求气密、厚度小于3mm的冲压、轧制的薄板构件。是把焊件在接头处接触面上的个别点焊接起来。点焊要求金属要有较好的塑性。机器人点焊焊钳,用于机器人自动焊接。模型为stp通用格式。
DTMC-0223GAI-2型焊钳
DTMX-0044-20GAI型焊钳
DTMX-0239-10型焊钳
DTMX-0376-1型焊钳
全套图纸
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至:









")
")


")
")
")