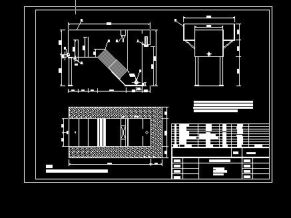
装配图
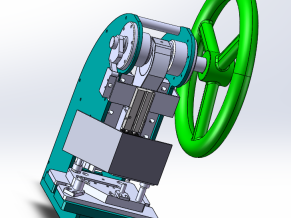
多脚机器人全套图 多脚机器人设计模型是多足机器人的一种。仿生式六足机器人,顾名思义,六足机器人在我们理想架构中,我们借鉴了自然界。昆虫的运动原理。足是昆虫的运动器官。昆虫有3对足,在前胸、中胸和后胸各有一对,我们相应地称为前足、中足和后足。每个足由基节、转节、腿节、胫节、跗节和前跗节几部分组成
全套图
等轴测
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至: