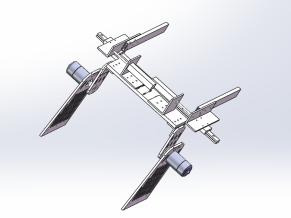
等轴测
龙门驱动的HF RFID产品定位系统是我作为机电工程专业学生的FYP的最终产品。虽然没有物理证明它作为生产哺乳识别系统的功能,但通过模拟和理论证明,我通过使用这个原型的方法获得了90%以上的准确率,通过模拟和使用实际HF RFID套件的理论证明。工作原理: - 1. HF RFID阅读器将通过机架机构的可移动区域进行扫描。 2. RFID阅读器将在检测到标签后返回标签的读取数据。同时,计步器会计算出当前步进电机在xy轴龙门运动时的步数。 3. xy轴的步数和标签的返回数据被收集并输出到.csv文件中。 4. CSV文件将被处理以获得RFID标签的质心坐标。获取质心坐标的方法是将x和y数据点平均返回到.csv文件。优点: 1. RFID系统的价格有效-与UHF RFID系统相比价格更便宜2.非复杂系统-与使用三角测量法和信号强度获取位置的UHF RFID系统相比,易于计算以获取标签位置。 3.直接产品位置标识-使用的方法很简单,最重要的是,如果每次水平迭代的间隔减少,精度可以保持在几毫米的范围内。缺点: 1.机械运动-摩擦和材料疲劳中的能量损失2.标签碰撞-当标签相互靠近时,标签的检测率会降低一半。这意味着使用单个标签,我总共可以获得250个我所在位置的数据点。然而,当标签相互靠近时,由于电磁波之间的干扰,感兴趣的标签可能只有100个数据点。减少数据点会影响适应数据点平均方法的产品位置识别算法。 3.非实时产品位置识别系统-系统必须存储单个系统的输出并将其输出到.csv文件或等效文件。扫描完成后,才进入数据处理阶段。但是,UHF RFID系统可以实现实时产品位置识别。 4.耗时-扫描会消耗时间。但是,可以通过向系统添加更多RFID标签来减少时间。但是,需要额外的控制器

装配

三维