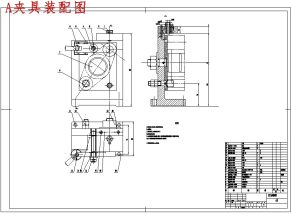
A总装图
以基于基于直角坐标的倒茶机构设计作为研究方向直角坐标机器人,直角坐标是以XYZ直角坐标系统为基本数学模型,可以完成在XYZ三维坐标系中任意一点的到达和遵循可控的运动轨迹,由于其成本低廉、系统结构简单我认为可以将其运用在倒茶机构上。而倒茶机构将在人们不远的智能生活中广泛应用具有很大的实际意义和应用价值。因此,本课题研究的意义重大。
垂直进给
抓手
机架与滑轨
水平进给
滚珠丝杆
设计所包含文件
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至: