

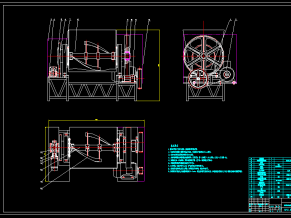
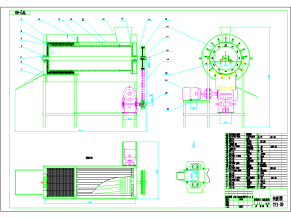
װ����ͼ-Model
�ڹ�ҵ�ϣ��Զ�����ϵͳ���Ź㷺��Ӧ�ã��繤ҵ�Զ����������ƣ������ϵͳ���������ȡ�����ҵ����������Խ��µĵ����豸��������ʼ�ı��ִ�����ҵ��ò�������Ϊ�����ɶ�Բ�����������ϰ��˹�ҵ�����ˣ��乤������Ϊ����ֱ�߷����������ת�������������������£���ִ�н�������һ����ˮ���õ���һ����ˮ����һ�Ķ���,�����Ƕ�������ƹ�����ȫ��Ľ��ܺ��ܽᡣ
Ŀ¼
Ŀ¼������������������������������������������1
����ժҪ����������������������������������������������������������2
Abstract �������������������������������������������������������� 2
��1�����ۡ��������������������������������������������������� 3
��2�¹�ҵ�����˵�������ơ����������������������������������� 3
2.1��ҵ�����˵���ɼ������ֹ�ϵ�������������������������� 3
2.2��ҵ�����˵���Ʒ����������������������������������������� 4
2.2.1���Ҫ�������������������������������������������� 5
2.2.2���巽���ⶨ������������������������������������������ 5
2.2.3��ҵ�����˵���Ҫ������������������������������������ 5
��3�¹�ҵ�����˵Ļ�еϵͳ��ơ��������������������������� 6
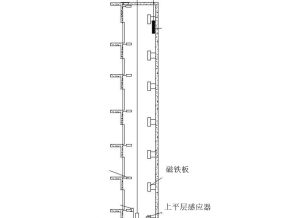
3.1��ҵ�����˵��˶�ϵͳ������������������������������������ 6
3.1.1�����˵��˶������������������������������������������� 6
3.1.2�����˵��˶����̷����������������������������������� 7
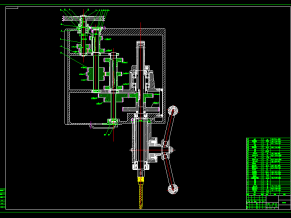
3.2��ҵ�����˵�ִ�л�����ơ������������������������������� 8
3.2.1ĩ��ִ�л�����ơ������������������������������������� 8
3.2.2�ֱۻ�����ơ��������������������������������������� 11
3.2.3�����ͻ�����ơ��������������������������������������� 12
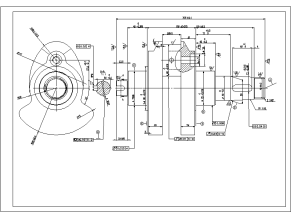
3.3��ҵ�����˵Ļ�е����װ����ƨE������������������ 18
3.3.1����˿����ѡ�������������������������������������� 18
3.3.2г�����ֵ�ѡ�������������������������������������� 19
3.3.3��������ѡ�������������������������������������� 20
��4�¹�ҵ�����˵ļ��������ϵͳ������������������������ 20
4.1��ҵ�����˿���ϵͳ���ص㼰�Կ��ƹ��ܵĻ���Ҫ��E�� 21
4.2���������ϵͳ����Ʒ��������������������������������� 22
4.3Ӳ����·����ɡ������������������������������� 22
��5�¹�ҵ����������ʱӦ��ȡ�İ�ȫ��ʩ���������������� 22
5.1��ȫҪ�������������������������������������������� 22
5.2ʵʩ���������������������������������������������������� 23
������������������������������������������������������� 23
�ο����ס������������������������������������������� 24

������-Model

�����ռ�ͼ-Model

������ͼ-Model

Ŀ¼

֧��-Model

֧��-Model

�ն�ִ����-Model

ת������-Model
���������������û��ϴ�������Ȩ��ԭ�������У����漰��Ȩ���⣬����������ϵ�����ǽ���ʱ������
















")




