

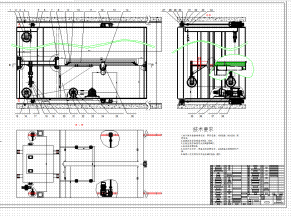
装配图
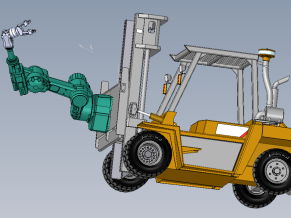
各种机器人近年来发展迅速,采用并联运动机构实现多座标位置控制具有重量轻、机械结构简单等优点。传统的工业机器人常用于搬运、喷漆、焊接和装配工作。工业现场的很多重体力劳动必将由机器代替这一方面可以减轻工人的劳动强度另一方面可以大大提高劳动生产率。焊接机器人是从事焊接(包括切割与喷涂)的工业机器人。根据国际标准化组织(ISO)工业机器人术语标准焊接机器人的定义,工业机器人是一种多用途的、可重复编程的自动控制操作机(Manipulator),具有三个或更多可编程的轴,用于工业自动化领域。为了适应不同的用途,机器人最后一个轴的机械接口,通常是一个连接法兰,可接装不同工具或称末端执行器。焊接机器人就是在工业机器人的末轴法兰装接焊钳或焊(割)枪的,使之能进行焊接,切割或热喷涂。主要有以下优点:
1)稳定和提高焊接质量;
2)提高劳动生产率;
3)改善工人劳动强度,可在有害环境下工作;
4)降低了对工人操作技术的要求;
5)缩短了产品改型换代的准备周期,减少相应的设备投资。
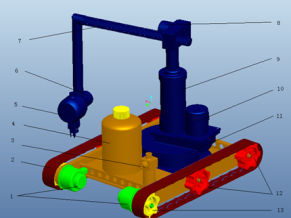
本题目设计一种基于轻型焊接机器人,将计算机、多轴运动控制器、可编程序控制器PLC应用于机器人进行轨迹控制。任务是为研制能逐步用于实际工业生产制造的机器人。焊接机器人具有刚度大、承载能力强、误差孝精度高、自重负荷比孝动力性能好、控制容易等一系列优点。
本文焊接机器人的研究方向:
(1)焊接机器人组成原理的研究
研究焊接机器人自由度计算、运动副类型、支铰类型以及运动学分析、建模与仿真等问题。
(2)焊接机器人运动空间的研究
(3)焊接机器人结构设计的研究
焊接机器人的结构设计包括很多内容,如机构的总体布局、安全机构设计。

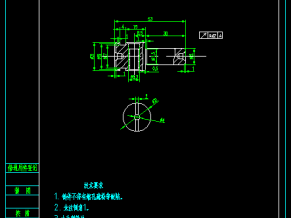
大销轴(1)

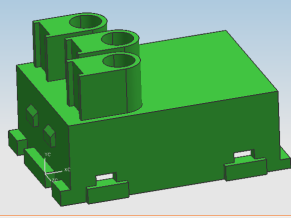
电机关节组件

电机轴

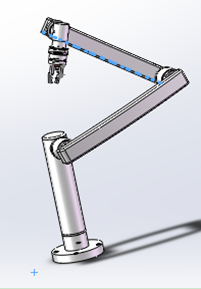
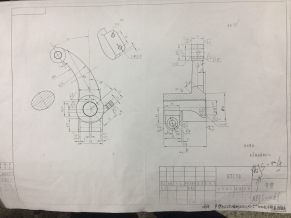
机器大臂

机器小臂

机械臂装配图

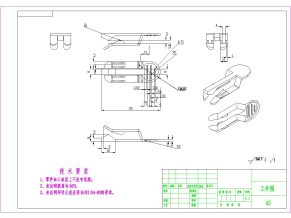
机械手执行手爪结构图

控制电路图

偏心套筒

目录

目录2

小连杆

轴承盖










CAD图纸+说明书")

PT28%CAD图纸+说明书")





