

3D1
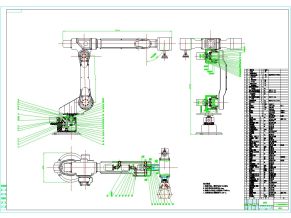
机械手是在在机械化、自动化生产过程中发展的一种新型装置,使用的一种具有抓取和移动工件功能的自动化装置。机械手能代替人类、重复枯燥完成危险工作,提高劳动生产力,减轻人劳动强度。该装置涵盖了位置控制技术可编程控制技术、检测技术等。本课题拟开发的物料三自由度圆柱坐标搬运机器人可在空间抓放物体,动作灵活多样,根据工件的变化及运动流程的要求随时更改相关参数,可代替人工在高温危险区进行作业,。

3D2

标准腰部传动大齿轮 A1

标准腰部传动小齿轮 A4

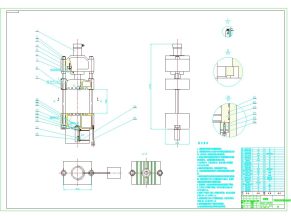
标准腰部结构图 A0

标准腰关节回转轴 A1

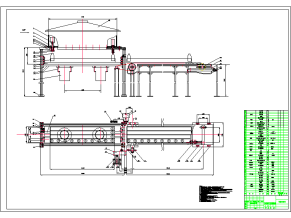
机械手装配图A0

任务要求

手臂联接座 A0

手爪-A1

说明书目录1

说明书目录2

说明书字数

原理图-A1

















钻21圆柱孔夹具装配图+夹具体+夹具说明")
CAD图纸+说明书")



