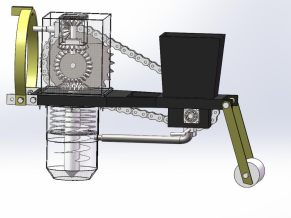
机械手总装图
首先,本文介绍了三自由度并联机械手机构的工作原理,并对其进行了运动学分析。其中,对机构的自由度进行的计算,采用几何法求得了其运动学正解以及其运动学逆解。其次,对机构进行了速度模型及雅克比矩阵的分析。实现了solidworks对机构的零部件与装配图三维建模。最后,通过个零部件的配合,实现了三自由度并联机械手的装配。
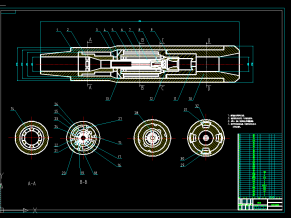
底板
关节座
电机座
顶板
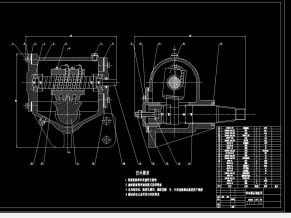
机器人工作图
字数统计
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至:























")







