

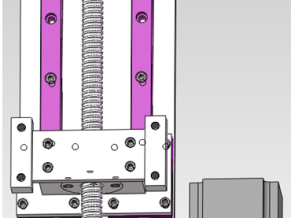
三维模型
图书自动取书装置是图书馆机器人的一种,是实现图书馆信息化与自动化融合的重要工具。本课题研发一种适用于闭架借阅图书的图书馆图书自动存取装置。该装置可以代替人工完成图书的自动上下架和整理工作,既减轻图书馆员的劳动强度,又提高工作效率。
本课题在分析图书自动上下架任务规划的基础上,设计基于直角坐标系的3自由度机械手,简单、实用的末端执行器。的主要内容包括:设计用于图书自动存取的直角坐标机械手及其末端执行机构,对机械手的结构设计进行校核和运动卞仿真;在SolidWorks软件坏境下对自动取书机械手进行三维建模及运动仿真。

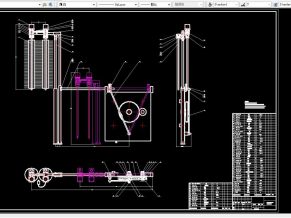
总装图

电机底板

滚珠丝杠

机械手底座

轴承座

目录及字数

文件清单
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!




















")


