

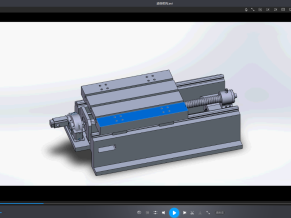
转配图
近20年来,气动技术的应用领域迅速拓宽,尤其是在各种自动化生产线上得到广泛应用。电气可编程控制技术与气动技术相结合,使整个系统自动化程度更高,控制方式更灵活,性能更加可靠;气动机械手、柔性自动生产线的迅速发展,对气动技术提出了更多更高的要求。
本课题设计源于对果蔬的搬运,传动方式采用气压传动,即用各种气缸来控制机械手的动作,控制部分结合可编程控制技术编写程序进行控制来实现两站之间的搬运。
机械手主要由手部、运动机构和控制系统三大部分组成。手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度。本课题中设计的果蔬搬运机械手主要有旋转、伸缩、升降、夹紧四个自由度组成。
课题从机械部分、气动部分和控制三部分对气动机械手进行设计,要求机械手实现上下站之间的搬运功能。机械部分重点是总体结构的设计、各个气缸的选择和安装设计、各零部件的结构设计等,气动部分主要是给出了果蔬搬运机械手的气动原理图,而控制部分则主要是程序的设计和调试,采用西门子(S7-200)指令编程,给出了相应的梯形图、语句表和简单的流程图。
由于气动机械手有结构简单、易实现无级调速、易实现过载保护、易实现复杂的动作等诸多独特的优点,气动机械手正在向重复高精度,模块化,无给油化,?机电气一体化方向发展。可以预见,在不久的将来,气动机械手将越来越广泛地进人工业、军事、航空、医疗、生活等领域。
关键词:可编程控制器,柔性自动生产线,自由度,梯形图

PLC接线图

目录

总体布局

T形图

底座

气动原理图

气爪

手臂部分图纸

下气爪






















")


