机械人
摘要
根据现有工厂的实际生产环境,以及如何实现自动化设备的合理使用和布局,设计了多关节自由度的送料机械手的结构,并在锻造中实现了关节式柔性操作和装卸机械手。机械手的基本结构形式是通过关节旋转来实现的。它能在一定空间内达到任意位置,实现对锻件精确装卸的传递功能。通过对本设计的要求和查阅相关设计资料,结合现有市场机械手的设计因素等方面,确定了本设计机械手合理的总体设计方案。在提出的方案中,通过相关技术分析和参数计算,参考相关文献,确定了本设计的锻压机自动送料机械手。臂、指端夹紧锻件等结构参数的标准化设计。在提出的设计方案的基础上,通过对设计结构中重要构件的取样、结构分析、参数化计算和校核,最终确定构件的结构尺寸。
设计中采用SolidWorks软件对机构进行三维造型设计。根据本设计的尺寸,用软件绘制了锻压机自动送料机械手结构设计的实体模型,经推导后绘制出相应的CAD设计结构工程图。从而达到快速、准确传递锻件的目的,最终实现装卸动作。
关键词:关节旋转,机械手,机械手,三维建模

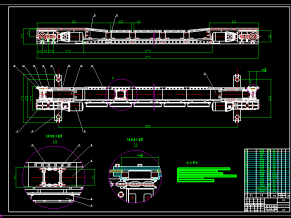
整体结构

履带结构

传动结构

明细

设计要求

齿轮轴