

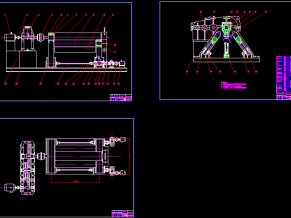
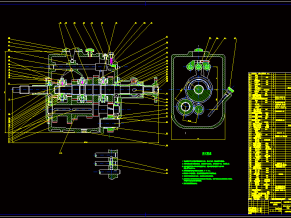
总装配图A0
气动机械手回转臂结构设计全套齐全(含全套CAD图纸)
摘要
本文简要介绍了机器人的概念,机械手的组成和分类,机械手的自由度和坐标形式,气动技术的特点,PLC控制的特点及国内外的发展状况。
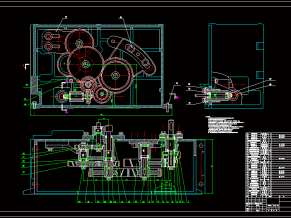
本文对机械手进行总体方案设计,确定了机械手的坐标形式和自由度,确定了机械手的技术参数。同时,计算并设计出了回转气缸、伸缩手臂的机械机构。
设计出了机械手的气动系统,绘制了机械手气压系统工作原理图,对气压系统工作原理图的参数化绘制进行了研究,大大提高了绘图效率和图纸质量。
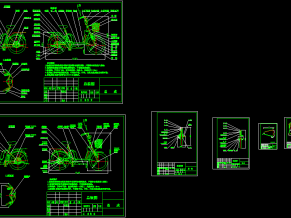
利用可编程序控制器对机械手进行控制,根据机械手的工作流程制定了可编程序控制器的控制方案,设计出了人工移动式(无动力)点位示教控制软件,并画出了机械手的工作时序图,并绘制了可编程序控制器的控制程序。
目录
摘要(中文).........................................................Ⅰ
(英文).........................................................Ⅱ
第一章绪论
1.1机械手概述.......................................................1
1.2机械手的组成和分类...............................................1
1.2.1机械手的组成...............................................1
1.2.2机械手的分类...............................................3
1.3国内外发展状况...................................................4
1.4课题的提出及主要任务.............................................5
1.4.1课题的提出.................................................5
1.4.2课题的主要任务.............................................6
第二章机械手的设计方案
2.1机械手的座标型式与自由度........................................7
2.2机械手的手部结构方案设计........................................8
2.3机械手的手腕结构方案设计........................................8
2.4机械手的手臂结构方案设计........................................8
2.5机械手的驱动方案设计............................................8
2.6机械手的控制方案设计............................................8
2.7机械手的主要参数................................................9
2.8机械手的技术参数列表............................................9
第三章手臂伸缩,回转气缸的设计与校核
3.1手臂伸缩部分尺寸设计与校核......................................11
3.1.1手臂伸缩部分方案一的尺寸设计与校核........................11
3.1.2手臂伸缩部分方案二的尺寸设计与校核........................11
3.1.3导向装置..................................................14
3.1.4平衡装置..................................................14
3.2手臂回转部分尺寸设计与校核......................................14
3.2.1尺寸设计..................................................14
3.2.2尺寸校核..................................................14
第四章气动系统设计..................................................16
第五章机械手的PLC控制设计
5.1可编程序控制器的选择及工作过程..................................18
5.1.1可编程序控制器的选择......................................18
5.1.2可编程序控制器的工作过程..................................20
5.2 S7-200的扩展模块...............................................21
5.2.1数字量I/O扩展模块........................................21
5.2.2模拟量扩展模块............................................22
5.2.3通信模块..................................................22
5.2.4功能模块..................................................23
5.3 PLC程序的实现..................................................23
5.4本程序设计思路.................................................24
第六章上位界面的设计...............................................27
第七章结论...........................................................31
结束语.................................................................32
参考文献...............................................................3

零部件图

程序流程图A2

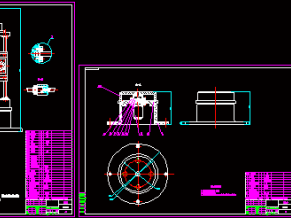
零件图回转缸A1

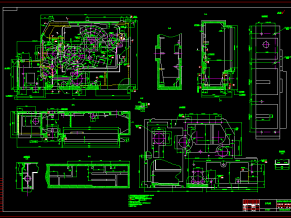
伸缩臂零件图(1)A1

伸缩臂装配图(2)A1

试验台PLC接线图A2











")
")
")
")
")
")
")
")
")