

зАХфЭМ
ХІПлздЖЏГхбЙзщзАЬЈвьаЮСуМўМаГжзАжУЩшМЦ(КЌCADЭМжНКЭWORDЫЕУїЪщ)
еЊвЊ
ХІПлздЖЏГхбЙзщзАЬЈвьаЮСуМўМаГжзАжУВЩгУМаГжЛњЙЙНјааЩшМЦ.МаГжЛњЙЙОпгаИеЖШДѓЁЂГадиФмСІЧПЁЂЮѓВюаЂОЋЖШИпЁЂзджиИККЩБШаЂЖЏСІадФмКУЁЂПижЦШнвзЕШвЛЯЕСагХЕуПЩвдзїЮЊКНЬьЩЯЕФЖдНгЦїЁЂКНКЃЩЯЕФЧБЭЇОШдЎЖдНгЦїЃЛЙЄвЕЩЯПЩвдзїЮЊДѓМўЕФзАХфЛњЦїШЫЁЂОЋУмВйзїЕФЮЂЖЏЦїЃЛПЩвддкЦћГЕзмзАЯпЩЯздЖЏАВзАГЕТжВПМўЃЛСэЭтЃЌвНгУЛњЦїШЫЃЌЬьЮФЭћдЖОЕЕШЖМРћгУСЫВЂСЊММЪѕЁЃ
БОЮФМаГжЛњЙЙЕФбаОПЗНЯђЃК
ЃЈ1ЃЉМаГжЛњЙЙзщГЩдРэЕФбаОП
баОПМаГжЛњЙЙздгЩЖШМЦЫуЁЂдЫЖЏИБРраЭЁЂжЇНТРраЭвдМАдЫЖЏбЇЗжЮіЁЂНЈФЃгыЗТецЕШЮЪЬтЁЃ
ЃЈ2ЃЉМаГжЛњЙЙдЫЖЏПеМфЕФбаОП
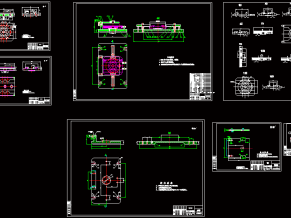
ЃЈ3ЃЉМаГжЛњЙЙНсЙЙЩшМЦЕФбаОП
МаГжЛњЙЙЕФНсЙЙЩшМЦАќРЈКмЖрФкШнЃЌШчЛњЙЙЕФзмЬхВМОжЁЂАВШЋЛњЙЙЩшМЦЁЃ
гЩгкБОШЫЫЎЦНгаЯоЃЌЮФжаЕФДэЮѓКЭВЛзудкЫљФбУтЃЌПвЧыИїЮЛРЯЪІИјгшХњЦРКЭжИе§ЁЃ
ФПТМ
1ЧАбд1
1.1ПЮЬтбаОПБГОАвтвх1
1.2ЙњФкЭтбаОПЯжзД2
2ВЂСЊЛњаЕЪжЕФНсЙЙМАЙЄзїдРэ6
2.1ВЂСЊдЫЖЏЛњЙЙИХЪі6
2.2ВЂСЊЕФНсЙЙМАЛњаЕдЫЖЏдРэ7
2.3ВЂСЊЛњаЕЪжЕФзмЬхНсЙЙ7
2.4ПижЦЯЕЭГНсЙЙМАЙЄзїдРэ8
2.5МаГжЛњЙЙЙЄзїПеМфЕФЗжЮі9
2.6БлВПНсЙЙЩшМЦЕФЛљБОвЊЧѓ10
3МаГжЛњЙЙжївЊВПМўЕФЩшМЦ13
3.1ЕчЖЏЛњбЁаЭ13
3.1.1ЕчЛњЕФЗжРр13
3.1.2бЁдёВННјЕчЛњЕФМЦЫу14
3.2ДЋЖЏНсЙЙаЮЪНЕФбЁдё17
3.3МИКЮВЮЪ§ЕФМЦЫу17
3.4жсЕФЩшМЦМАаЃКЫ18
3.5жсГаЕФЪйУќаЃКЫ20
3.6ЪжзІМаГжЦїНсЙЙЩшМЦгыаЃКЫ22
3.6.1ЪжзІМаГжЦїжжРр22
3.6.2МаГжЦїЩшМЦМЦЫу23
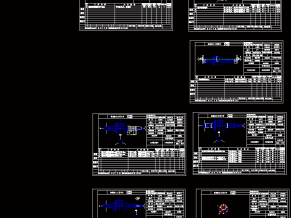
3.7МаГжзАжУЦјИзЩшМЦМЦЫу24
3.7.1ГѕВНШЗЯЕЭГбЙСІ24
3.7.2ЦјИзМЦЫу25
3.7.3ЛюШћИЫЕФМЦЫуаЃКЫ27
3.7.4ЦјИзЙЄзїааГЬЕФШЗЖЈ27
3.7.5ЛюШћЕФЩшМЦ28
3.7.6ЕМЯђЬзЕФЩшМЦгыМЦЫу28
3.7.7ЖЫИЧКЭИзЕзЕФМЦЫуаЃКЫ29
3.7.8ИзЬхГЄЖШЕФШЗЖЈ30
3.7.9ЛКГхзАжУЕФЩшМЦ30
3.8ЦјбЙдЊМўбЁШЁМАЙЄзїдРэ30
3.8.1ЦјдДзАжУ30
3.8.2жДаадЊМў31
3.8.3ПижЦдЊМў32
3.8.4ИЈжњдЊМў33
3.8.5ецПеЗЂЩњЦї34
4МаГжЛњЙЙЛњМаГжЛњЙЙПеМфЗжЮі35
4.1МаГжЛњЙЙМаГжЛњЙЙЛњЕФдЫЖЏбЇдМЪј35
4.1.1СЌИЫИЫГЄдМЪј35
4.1.2дЫЖЏИБзЊНЧдМЪј35
4.1.3СЌИЫИЫМфИЩЩц36
4.2ШЗЖЈМаГжЛњЙЙПеМфЕФЛљБОЗНЗЈ36
змНс37
ВЮПМЮФЯз38
жТаЛ39

ЭМжНМЏКЯ
ЩъУїЃКФкШнРДздгУЛЇЩЯДЋЃЌжјзїШЈЙщдзїепЫљгаЃЌШчЩцМАЧжШЈЮЪЬтЃЌЧыгыЮвУЧСЊЯЕЃЌЮвУЧНЋМАЪБДІРэЃЁ












")
")
")
ФЃОп-ЮхН№-БЪМЧБОЕчФдПЧЩЯПЧГхбЙФЃЩшМЦ")
ФЃОпМазгГхбЙМўЩшМЦ")
ФЃОп-ЗтБеАхГЩаЮФЃМАГхбЙЙЄвеЩшМЦ")
ФЃОп-ЕчЛњЬПЫЂМмРфГхбЙФЃОпЩшМЦ")
ФЃОпДЋЖЏИЧГхбЙЙЄвежЦЖЈМАГхПзФЃОпЩшМЦ")
здЖЏЭтдВФЅДВздЖЏЩЯСЯЯЕЭГЩшМЦ(КЌШЋЬзCADЭМжН)")
здЖЏСРвТМмЩшМЦ(КЌШЋЬзCADЭМжН)")