

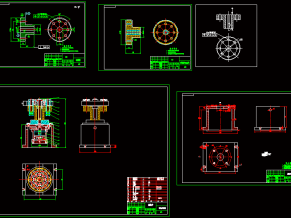
CNC装配图
(有CAD图)SC750三轴伺服驱动机器人机构设计
进入21世纪后,FANUC公司开发成功了配备有视觉传感器和力觉传感器的智能机器人。到现在已拥有可搬运质量从2公斤到1.2吨的种类丰富的商品系列。随后,FANUC公司又开发了运用这一智能机器人的长时间连续机械加工系统机器人单元。在整个加工工序中加工作业本身使用数控机床进行自动化加工已经非常普遍了。但是,附带作业,毛比如在加工中心的夹具上进行加工材料装卸的作业,以及去毛刺边,清洗等作业中的很多部分,现在还是依靠人工来完成。机器人单元使用智能机器人,不但实现了这些作业的自动化,而且在世界上最早实现了。小时的长时间连续加工,现在在FANUC公司的工厂共运转着13套这样的机器人单元。机器人单元使用了两种控制装置也就是CNC和机器人控制器我们现在正在开发使这两种控制装置都可以单独地显示双方状态的功能,以进一步推进机床和机器人的融合。[1]
随着我国工业自动化水平的不断提高,在机械加工与制造领域,以及各种装配与包装自动化生产线上机械手的应用已相当普遍机械手通常担负着上料下料等加工任务。由于PLC顺序控制具有系统简单可靠,控制灵活方便等特点,而且从PLC诞生之日起其最基本最普遍的应用领域就是在工业环境下的顺序控制,因此,基于PLC顺序控制的机械手在工业自动化领域中得到广泛的应用。
机器人是一种很特别的生产工具,因此,机器人应用的范围十分广泛。这些应用可以被划分为3类:材料处理、材料搬运和装配。在材料处理中,机器人用工具来加工和处理原材料。例如,机器人工具可包括钻头,从而可以在原始材料上执行钻孔操作。材料搬运包括装载零件。这些操作可以由机器人可靠地重复执行,因此提高了质量,减少了废料损失。装配是机器人技术的另一个广泛应用。自动装配系统能合并自动测试、机器人自动控制和机械处理,以减少劳动成本,提高产量,消除人工操作的危险性。
目录
前言2
第一章绪论3
1.1引言3
1.2工业机器人的含义4
1.3选题背景与意义5
1.4工业机器人的组成6
1.5工业机器人的发展及国内外发展趋势7
第二章SC750三轴伺服驱动机器人结构设计方案12
2.1机械手的设计方法12
2.1.1机械手的选择与分析12
2.1.2直角坐标机器人的设计方法13
2.2机械手的结构设计19
2.2.1机器人的总体设计19
2.2.2机械手的传动部件设计20
2.2.3机械手的臂部设计21
2.3 SC750三轴伺服驱动机器人机构的特点21
第三章工业机器人的运动系统分析22
3.1工业机器人的运动系统分析22
3.1.1机器人的运动概述22
3.1.2机器人的驱动方式25
第四章SC750三轴伺服驱动机器人零件的设计26
4.1伺服电机的选择26
4.2减速机的选择28
4.3齿轮齿条的选择30
4.4导轨的选择38
第五章结论40
致谢41
参考文献42

Z轴滚珠丝杠

小齿轮

标准直齿圆柱齿轮

连接板

调整垫片

轴承座

轴承压盖














")
")
")
台式车床车头箱孔系加工分配箱机构设计")
机器人送料(四自由度)")
")
(含CAD图纸和WORD说明书)")
")
")
")