

整体装配图A0
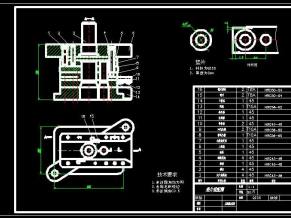
钻孔机器人设计(含全套CAD图纸)
摘要
自从20世纪60年代初世界第一台机器人诞生以后,机器人技术得到了迅速地发展。当今机器人技术的发展趋势主要有两个突出的特点:一个是机器人的应用领域的不断扩大;另一个是机器人的性能的不断提高。随着社会的发展,机器人已经被用在钻孔工业中,它被用来代替人类做一些简单、重复或危险的工作。同时,它可以代替人类做一些环境比较里恶劣的工作。本文主要论述了一种钻大工件的机器人结构的设计PR30-51多手钻孔机器人,本结构主要采用液压控制升降台的上下左右的运动,和电机控制机械手的竖直钻,本机器人能够在3米高度的工作范围内对起重机大梁进行上钻和侧钻。采用感光传感器对机器人的运动位置进行控制,控制机器人的转向和机器人离工件的距离等。此钻孔机器人具有结构简单,工作稳定,便于移动等优点。

大臂

底座

法兰盘

机械手支座

零件总成图1

小臂















")



")
")
")
")
