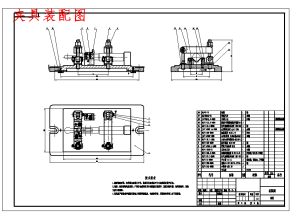
зАХфЭМA0
еЊвЊ
ЫцзХПЦММКЭЩчЛсЕФЗЩЫйЗЂеЙЃЌЗўЮёЛњЦїШЫЗЂеЙбИУЭЃЌвдМАЛњЦїШЫдкИїжжаавЕЕФгІгУЃЌЖМеЙЯжГіСЫМЋДѓЕФаЇТЪЁЃЙЄвЕЛњЦїШЫдкжиЙЄвЕЗНУцЕФгІгУЃЌНтЗХСЫРЭЖЏШЫУёЕФЫЋЪжЃЛвНСЦЛњЦїШЫдквНбЇЗНУцЕФгІгУКЭЗўЮёЛњЦїШЫдкМвЮёЗНУцЕФБэЯжЃЌдНРДдНЖрЕФжЧФмВњЦЗМЋДѓЕФЬсИпСЫШЫУЧЕФЩњЛюжЪСПЁЃвЛЗНУцЃЌЯждкЕФФъЧсШЫЫЕЛюбЙСІЁЂЙЄзїбЙСІдіДѓЃЌЪЙЕУЫћУЧУЛгаЖргрЕФЪБМфРДзіМвЮёЃЌЗўЮёЛњЦїШЫЕФГіЯжБуФмКмКУЕФНтОіетИіЮЪЬтЃЛСэвЛЗНУцЃЌЮвЙњШЫПкЕФРЯСфЛЏвЛжБЪЧвЛИіКмДѓЕФЮЪЬтЃЌВЛНіЪЧЖдЩчЛсЃЌИќЪЧЖдМвЭЅЃЌЖјдкХуАщРЯШЫЗНУцЃЌМвЭЅЗўЮёЛњЦїШЫвВЗЂЛгзХживЊЕФзїгУЁЃ
БОЮФЩшМЦСЫвЛжжеыЖд2-6ЫъбЇСфЧАЖљЭЏЕФЃЌвЛПюгУгкЗжМ№ЁЂЪеМЏЁЂДцДЂЭцОпЕФЗўЮёЛњЦїШЫЃЌЖдетжжЗўЮёЛњЦїШЫНјааСЫЛњЦїШЫБОЬхЕФНсЙЙЩшМЦЁЃЪзЯШЭЈЙ§ЗжЮіЭцОпЫбМЏЛњЦїШЫЕФШЮЮёЪщжаЕФЩшМЦвЊЧѓЃЌШЗЖЈСЫаазпЛњЙЙЕФдЫЖЏЗНЪНЁЂЪеМЏЛњЙЙЕФЪеМЏСїГЬЁЂЩ§НЕЛњЙЙЕФаЮЪНЃЌвдМАЖдЪгОѕЪЖБ№ЁЂгявєЪЖБ№ЯЕЭГНјааСЫбЁаЭЃЌДгЖјЭъГЩСЫзмЬхНсЙЙЕФЩшМЦЁЃ
ЙиМќДЪЃКжЧФмЗўЮёЛњЦїШЫЃЛНсЙЙЩшМЦЃЛЕчЛњЧ§ЖЏЃЛаазпЛњЙЙ
ФПТМ
ЕквЛеТаїТл1
1.1ИХТл1
1.2баОПЕФФПЕФМАвтвх3
1.3ЙњФкЭтбаОПЯжзД3
1.4БОЮФжївЊбаОПФкШн5
ЕкЖўеТЭцОпЫбМЏЛњЦїШЫзмЬхЗНАИ6
2.1змЬхЗНАИЕФШЗЖЈ6
2.1.1аазпЛњЙЙЗНАИЖдБШ6
2.1.2аазпЛњЙЙЗНАИЕФШЗЖЈ9
2.1.3ЪеМЏЛњЙЙЗНАИЖдБШ9
2.1.4змЬхНсЙЙВМОж10
2.2ЪеМЏЁЂЗжМ№ЗНЪНМАЙЄзїСїГЬ11
2.2.1ЪЖБ№ЁЂЖЈЮЛ11
2.2.2ЪеМЏ12
2.2.3ЗжМ№12
2.2.4ЭЖЗХ13
ЕкШ§еТаазпЛњЙЙЩшМЦМЦЫу15
3.1аазпЛњЙЙЕФзмЬхЗНАИЩшМЦ15
3.1.1аазпЛњЙЙЕФзмЬхЩшМЦвЊЧѓ15
3.1.2жИБъвЊЧѓ15
3.2аазпЛњЙЙНсЙЙбЁдё15
3.2.1ШЋЯђТжНсЙЙаЮЪНЕФбЁдё16
3.2.2ЕзХЬНсЙЙЩшМЦ17
3.2.3ШЋЯђТжЕзХЬЕФдЫЖЏбЇЗжЮі17
3.2.4ШЋЯђТжЕзХЬЕФЗНЯђПижЦ20
3.3аазпЛњЙЙЕчЛњбЁаЭ21
3.3.1ЕзХЬЧ§ЖЏСІОиМЦЫу21
3.3.2ЕчЛњЙІТЪКЭзЊОиЕФМЦЫу23
3.3.3ЕзХЬЧ§ЖЏЕчЛњЕФбЁдё24
ЕкЫФеТЪеМЏЛњЙЙЩшМЦ25
4.1ИКЦЋжУЪНЧњБњЛЌПщЛњЙЙ25
4.1.1ЩшМЦвЊЧѓ25
4.1.2ИКЦЋжУЪНЧњБњЛЌПщЛњЙЙдЫЖЏбЇЗжЮі25
4.1.3ИКЦЋжУЪНЧњБњЛЌПщЛњЙЙСІбЇЗжЮі27
4.2ЪеМЏЛњЙЙЩшМЦ28
4.2.1ЪеМЏВљНсЙЙЩшМЦ28
4.2.2ЧњБњЁЂСЌИЫНсЙЙЩшМЦ29
ЕкЮхеТЩ§НЕЛњЙЙЩшМЦМЦЫу30
5.1Ч§ЖЏаЮЪН30
5.2Щ§НЕЛњЙЙЙЄзїЦНЬЈНсЙЙЩшМЦ33
ЕкСљеТЪгОѕЁЂгявєЪЖБ№ЯЕЭГбЁаЭ34
6.1ЪгОѕЯЕЭГбЁаЭ34
6.2гявєЪЖБ№ЯЕЭГбЁаЭ34
НсТл35
ВЮПМЮФЯз36
жТаЛ38

зжЪ§

ФПТМ

Щ§НЕЛњЙЙA1

ЧњБњA3

аазпЛњЙЙA1

ЪеМЏЛњЙЙA1

еЊвЊ

ЩшМЦЫљАќКЌЮФМў

ЩшМЦВЮЪ§

СЌИЫA3
ЩъУїЃКФкШнРДздгУЛЇЩЯДЋЃЌжјзїШЈЙщдзїепЫљгаЃЌШчЩцМАЧжШЈЮЪЬтЃЌЧыгыЮвУЧСЊЯЕЃЌЮвУЧНЋМАЪБДІРэЃЁ