

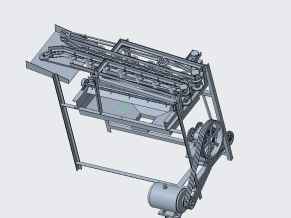
0装配图
步行四边形机器人结构设计
摘要
随着当今科技不断进步,越来越多的领域开始出现机器人,人们会利用机器人完成一些危险任务或者复杂情况下的工作,从而减少对人员产生的威胁和伤害。纵观机器人行业的发展情况,步行四边形机器人可谓是庞大的一个分支,因其具有稳定性强,承载能力好以及结构设计简单等优势,同时相对于超过六英尺,八条腿的机器人来说,更加的小巧轻便,所以近些年来备受机器人行业设计者的喜爱和重视。
本文所设计的机器人为六足机器人,采用六足昆虫足的对称分布形式,相对的两条腿由同一根轴进行驱动,轴与轴之间通过同步带轮进行连接来传递动力,直流伺服电机与中间轴通过同步带轮连接充当动力源。在进行步行时保证至少有三个足与地面相接触,以满足机器人在行走过程中的稳定性,以此为条件规划了对角步态,即同样动作的三足的分布方式为对角线分布。步行运动采用四杆机构来进行实现,通过分析各杆件的长度与杆件间的位置关系证明了四杆机构可以实现步行动作;并通过对其压力角、传动角的分析研究,验证了四杆机构具有良好的运动性能。
关键词步行机器人;四杆机构;步态规划
Structure Design Of Walking Quadrilateral Robot
Abstract
With the continuous progress of science and technology,more and more fields begin to appear robots. People will use robots to complete some dangerous tasks or work in complex situations,so as to reduce the threat and harm to people. Looking at the development of the robot industry,walking quadrilateral robot is a huge branch,because it has the advantages of strong stability,good bearing capacity and simple structure design. At the same time,compared with the robot with more than six feet and eight legs,it is more compact and light,so in recent years,it is loved and valued by the designers of the robot industry.
The robot designed in this paper is a hexapod robot,which adopts the symmetrical distribution form of Hexapod insect foot. The two opposite legs are driven by the same shaft. The power is transmitted between the shaft and the shaft through the synchronous pulley. The DC servo motor and the intermediate shaft are connected through the synchronous pulley as the power source. In order to meet the stability of the robot in the process of walking,at least three feet should be contacted with the ground surface during walking. Based on this condition,the diagonal gait is planned,the distribution mode of the same three feet is diagonal distribution. The walking motion is realized by four-bar mechanism. By analyzing the relationship between the length of each bar and the position of the bar,it is proved that the four-bar mechanism can realize the walking motion. Through the analysis of its pressure angle and transmission angle,it is proved that the four-bar mechanism has good motion performance.
Key words walking quadrilateral robot; four-bar mechanism; crank rocke
目录
摘要I
Abstract II
第1章绪论1
1.1研究背景与研究的目的与意义1
1.2发展现状1
1.2.1国内发展现状1
1.2.2国外发展现状4
1.3本课题研究内容5
1.4本章小结5
第2章步行四边形机器人总体结构方案设计6
2.1拟定步行四边形机器人总体方案6
2.1.1方案的比较6
2.1.2步行四边形机器人步态规划8
2.1.3方案的确定9
2.2本章小结9
第3章结构的设计与校核11
3.1四杆机构的设计11
3.1.1曲柄存在的条件11
3.1.2急回运动特性和行程运动速比K的关系12
3.1.3压力角和传动角13
3.2机械传动的设计与计算14
3.2.1直流伺服电机的选型14
3.2.2同步带轮的设计15
3.2.3传动轴设计与计算21
3.3关键零部件的校核22
3.3.1轴的强度校核22
3.3.2键的强度校核23
3.4本章小结24
第4章主要零部件的3D建模与机器人的装配25
4.1轴的3D建模25
4.2带轮的3D建模25
4.3步行四边形机器人的装配26
4.4本章小结28
结论29
致谢30
参考文献31
附录A 33
附录B 43
绪论
研究背景与研究的目的与意义
近年来互联网技术的发展速度越来越快,带动了机器人技术的发展,使得机器人不再像从前那样局限于某些领域,各种各样的机器人融入到我们的生活中。现在最广泛被人们使用的是轮式机器人以及履带式机器人,多用于仓库存储、物资运输等地面较为平坦且环境简单的地方,例如快递仓库所使用的轮式机器人[1]。这类机器人在城市的工作效率很高,可以取代人类完成一些简单、机械化的工作,但不适用于复杂环境在野外等环境工作效率大大降低。为了满足人们的需求,足式机器人应运而生。它相比于其他类型的机器人有更加强大的环境适应性,可在凹凸不平的地面、沙滩等其他复杂地形进行移动[2]。
足式生物因其强大的机动能力与灵活性而遍布全世界的大陆,这种能力也足以支撑其在多种复杂环境之下行动自如。步行四边形机器人则是模仿自然界中灵活性较强的四足生物而来,如典型的犬型机器人,可在山地、丛林、建筑废墟中活动自如,进行物资运输、侦查、搜救等工作[3]。其次,在同等体积的情况下步行机器人的稳定性要强于轮式、履带式机器人,在出错的情况下也具有很强的自我调整能力。步行四边形机器人的结构决定了其质量、灵活度、运动能力等多种重要参数,所以步行四边形机器人机构设计可以优化机器人的各种性能,使其更加适应地形、降低运动时的错误率,从而提高其工作效率,对人类社会进步和发展有着重大意义。

侧板

带轮

顶板

短连杆

目录

前板

曲柄

腿

长连杆

中间轴

足
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!





![电动滚筒结构设计[含CAD图纸+文档资料全套]](http://img.jixie5.com/d/file/2019/04/04/6f3e23b6d17419cf3d7a82607977159e.jpg@!l)



















