基于救援机器人的RV减速器结构设计说明书
【参赛资料:约1.7w字说明书+10张CAD图纸,仅供参考学习!】
机器人用RV(Rotate Vector)传动是新兴起的一种传动,它是在传统针摆行星传动的基础上发展而来的,它不仅克服了一般针摆传动的缺点,而且因为具有结构较紧凑、体积小、重量轻、传动比范围大、精度保持稳定、传动平稳、承载能力强、超负荷能力强、刚性高、工作寿命长、效率高等一系列优点,是目前机器人驱动机构应用最广的精密传动之一。
本课题首先确定了RV减速器的传动方案,减速器由一级渐开线行星齿轮传动和一级摆线针轮传动相串联而构成;输入主动小齿轮与装于曲轴上的从动大齿轮啮合构成第一级传动;摆线齿轮啮合构成第二级传动,采用无针齿摆线内齿廓结构,即内齿廓不采用针齿滚动,而是直接使用摆线齿廓。
在RV减速器结构设计中,第二级传动曲轴驱动摆线轮作行星运动,为了载荷平衡,一般用两排摆线轮,呈180度倒置安装用于平衡,摆线轮与针齿壳相啮合而产生减速运动,经曲轴拨动输出盘输出。在实际结构中,为了提高承载能力并使内部受力均衡,动力由主动小齿轮(中心轮)输入后,由两个从动齿轮(行星齿轮)分别带动两根曲轴同步驱动摆线轮。曲轴的两端支承于输出盘和支承盘上。输出盘和支承盘之间用四个螺钉相联结,且用两个大直径的特轻型主轴承支承于针齿壳体上。输入输出反向传动。
第二阶段的工作是RV减速器力学分析、强度计算及摆线齿廓的理论研究与作图。RV减速器力学分析主要分析了针齿作用在摆线轮上载荷及转臂轴承作用在摆线轮上的力。强度校核计算主要进行了摆线轮与针齿的接触疲劳强度、弯曲疲劳强度校核计算,进行了转臂轴承的选择校核计算。第二阶段用了2个月的时间。
第三个阶段的工作是RV减速器的建模、出图、安排零件加工工艺及样机试制,用了6个多月的时间。

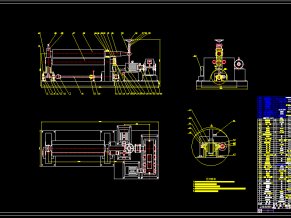
RV减速器装配图

柱销盘

资料总预览

摆线轮

支承盘

针齿壳

齿轮

齿轮轴

电机支架

基座

转臂