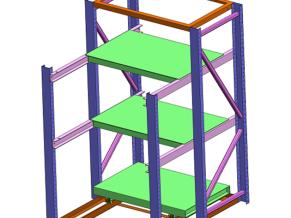
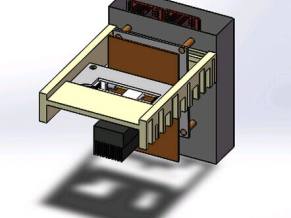
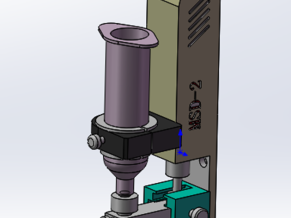
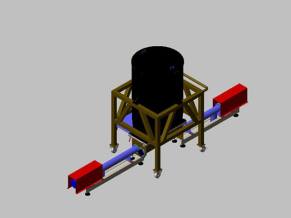
工业现场装配要求,工作站由ABB IRB120机器人、控制柜、传送带、旋转台、立体仓库等构成,旋转台、传送带分别输送子、母工件,由机器人进行装配,装配完毕后,再由机器人将成品件放入立体仓库.控制系统以西门子S7-300PLC为中心,网络组态以S7-300为主站,ABB IRB120机器人作为从站,以SIMATIC STEP7为平台,用Profibus协议实现通讯组态.旋转台选用德国百格拉步进电机(
软件版本:UG(NX)
文件格式:Prt
工业现场装配要求,工作站由ABB IRB120机器人、控制柜、传送带、旋转台、立体仓库等构成,旋转台、传送带分别输送子、母工件,由机器人进行装配,装配完毕后,再由机器人将成品件放入立体仓库.控制系统以西门子S7-300PLC为中心,网络组态以S7-300为主站,ABB IRB120机器人作为从站,以SIMATIC STEP7为平台,用Profibus协议实现通讯组态.旋转台选用德国百格拉步进电机(DM3910/LHA)及配套驱动器(D921),由S7-300PLC控制.KincoMT4512TE触摸屏采用MPI通讯协议,以MT5-S7-300适配器与西门子S7-300进行通讯连接,在主控柜实现工位选择、手动/自动切换、报警清除等功能.
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!