

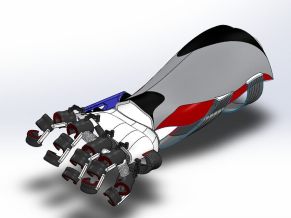
三维
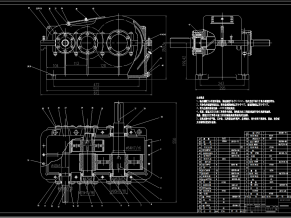
本文设计了一个五自由度串联机器人,首先通过计算得到执行端所需要的驱动力矩,再以此为依据选出该关节所需的减速器和伺服电动机,设计出外壳和关节的连接结构,绘制3D图,通过软件的测量求出设计好的部分重心,求出下一个关机所需的驱动力矩,选出所需的减速器和伺服电动机,以此类推最终完成总体设计,并且绘制了串联五自由度机器人的工程图。
关键词:五自由度串联机器人总体设计伺服电动机

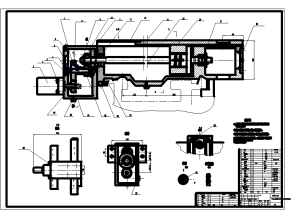
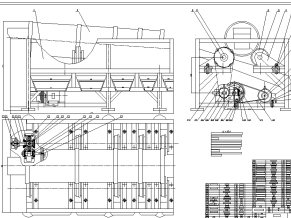
五自由度机器人装配体

39 小臂连接桶

1一轴减速器

2 一轴减速机入力轴

3 二轴减速器

4 二轴减速机入力轴

5 肘部连接轴

6 三轴减速机入力轴

7 三轴减速器TTRV-20E

8 五轴谐波减速器

9 轴

13 同步带轮

14 伞齿轮

30 手爪拉杆

31 手爪座

42 大臂支架

43 腕关节支架

44 肘关节支架

45 腰部支架









CAD图纸+说明书")


")



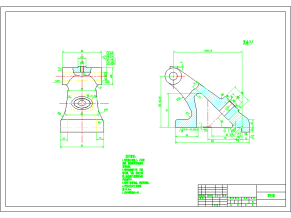
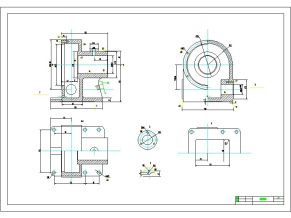
CAD三视图")
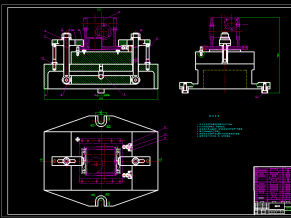
CAD总装配图")
CAD装配简图1")