预览图1
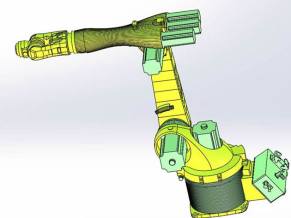
4JG0001-六轴机器人手臂3D模型,包括SolidWorks 3D原图,SW版工程图及CAD图纸等六轴机器人比四轴机器人多两个关节,因此有更多的“行动自由度”。六轴机器人的第一个关节能像四轴机器人一样在水平面自由旋转,后两个关节能在垂直平面移动。此外,六轴机器人有一个“手臂”,两个“腕”关节,这让它具有人类的手臂和手腕类似的能力。六轴机器人更多的关节意味着他们可以拿起水平面上任意朝向的部
软件版本:SolidWorks
文件格式:Sldprt/Sldasm/SLDDRW/dwg
4JG0001-六轴机器人手臂3D模型,包括SolidWorks 3D原图,SW版工程图及CAD图纸等
六轴机器人比四轴机器人多两个关节,因此有更多的“行动自由度”。
六轴机器人的第一个关节能像四轴机器人一样在水平面自由旋转,后两个关节能在垂直平面移动。此外,六轴机器人有一个“手臂”,两个“腕”关节,这让它具有人类的手臂和手腕类似的能力。
六轴机器人更多的关节意味着他们可以拿起水平面上任意朝向的部件,以特殊的角度放入包装产品里。他们还可以执行许多由熟练工人才能完成的操作。

预览图2