Ш§ЮЌ
ЛњЦїШЫДгбаЗЂГіРДЕНЯждкЖМвбОгаСЫПьШ§ЪЎФъЕФРњЪЗСЫЃЌЯждкЛњЦїШЫдкЩњЛюЁЂЩњВњжавбОВЛдйЪЧИпПЦММЕФДњбдДЪЃЌЖјЪЧдчОЭвбОБЛзїЮЊЩњВњЙЄОпЭЖШыЕНЪЕМЪЕФВйзїРяУцРДСЫЃЌдкетШ§ЪЎЖрФъЕФЗЂеЙжаЃЌШЫУЧЕФОМУВЛЖЯЗЂеЙЃЌДјРДЕФЪЧЩњЛюЫЎЦНвВВЛЖЯЕФЗЂеЙЃЌЫљвдЯждкгаЖржжЖрбљЕФЛњЦїШЫРДБЛШЫУЧгУЕНЩњЛюЩњВњРяУцРДЃЌЦфжаЃЌБШНЯживЊЕФвЛПюШЋЕиаЮТжЪНвЦЖЏЛњЦїШЫЃЌГЩЮЊвЛИіжиЕуПЦбаЕФЗНЯђЁЃ
БОДЮЩшМЦЕФШЋЕиаЮТжЪНвЦЖЏЛњЦїШЫЃЌдк60*60cmОиаЮХХЫЎЙЕЙмЕРФкЪЙгУЁЃгУгкЙмЕРЕФПЂЙЄбщЪеЁЂЖТШћМьВтЁЂЧхгйЕШСьгђЃЛжСЩйДяЕН300mЕФХРааЬНВтОрРыЃЛФмЗдНвЛЖЈеЯАЃЛФмЪЕЯжЧАНјЃЌКѓЭЫЕШЖЏзїЁЃ
ВщСЫЯрЙиЕФВФСЯжЎКѓЃЌЩшМЦСЫЧ§ЖЏзАжУЕФећИіЕФЙЙдьЃЌЩшМЦСЫГЕзгЕФТжзгЃЌГЕЩэЕШЁЃШЗЖЈСЫЕчЖЏЛњЕФРраЭЃЌЛЙгаМѕЫйЦїЕФРраЭЃЌЖдГЕТжжсНјааЩшМЦгыМЦЫуЁЃЮЊСЫПДетИіНсЙЙЪЧВЛЪЧе§ШЗЃЌВЂЧвгУШ§ЮЌШэМўНЋЭМжНЛГіРДСЫЁЃОЙ§БОДЮЩшМЦдкЙЎЙЬДѓбЇЫљбЇжЊЪЖЕФЭЌЪБЃЌЛЙЬсЩ§СЫзЈвЕжЊЪЖЕФЩшМЦЫЎЦНЃЌЮЊВНШыЩчЛсЕьЖЈСЫЛљДЃ

зАХфЭМA0

Ш§ЮЌЭМ

гвСЊжсЦїA2

жсГазљA2

зѓСЊжсЦїA2

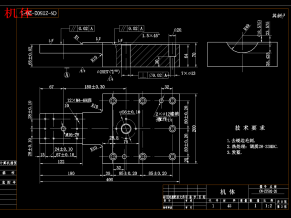
ГЕТжA2

ГЕТжЖЫИЧA3

ГЕТжжсA2

ЕзХЬA1

ШЋВПЮФМў

зжЪ§

ФПТМ
ЩъУїЃКФкШнРДздгУЛЇЩЯДЋЃЌжјзїШЈЙщдзїепЫљгаЃЌШчЩцМАЧжШЈЮЪЬтЃЌЧыгыЮвУЧСЊЯЕЃЌЮвУЧНЋМАЪБДІРэЃЁ