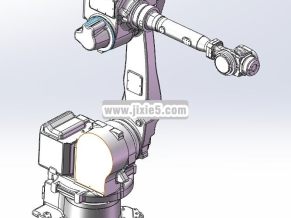
机械手总装图
机器人由执行机构、驱动装置、控制系统和智能系统。执行机构包括手部、腕部、臂部和腰部基座部(固定或移动);驱动装置是气驱动装置;控制系统包括单关节伺服控制器和关节协调及其它信息交换计算机;智能系统包括感觉装置、视觉装置和语言识别装置。它具有三个自由度,功用是确定手部在空间的位置,位置机构可确定操作机的空间工作范围。
机械手是自动化生产过程中使用的一种具有抓取和移动工件功能的自动化装置。随着自动控制技术的不断发展,机械手的研究及应用也不断更新换代。目前,已发展成为柔性制造系统FMS和柔性制造单位FMC中的一个重要组成部分。把机床设备和机械手共同构成一个柔性加工系统或柔性制造单位,它适用于中、小批量生产,可以节省庞大的工件输送装置,结构紧凑,而且适应性很强。当工件变更是,柔性生产系统很容易改变。有利于企业不断更新适销对路的花色品种,提高产品质量,更好地适应市场竞争的需要。
机械手的全部动作由电磁阀控制的气缸驱动。其中,上升、下降和左移、右移分别由双线圈两位电磁阀控制,机械手的放松、夹紧也由双线圈两位电磁阀(夹紧电磁阀)控制。机械手一般由执行系统、驱动系统、控制系统和人工智能系统组成,主要完成移动、转动、抓取等动作。
本课题来源于预研,设计合理机械手装置,传送过程中能实现抓娶提升、回转、下降、松开等动作,且动作顺序、动作速度可调。用气动驱动,PLC控制。包括总体设计,各执行机构设计,气动系统设计、计算,控制系统设计。技术要求有以下几点:
a.装卸、调整方便;
b.结构简单,工作安全可靠;
c.设计合理,尽量使用标准件,以降低制造成本;
d.用PLC对机械手进行控制。
总体设计思路:
a.确定总体结构的组成、框架及各部分的功能与工作目标。
b.根据设计任务书的要求,初步计算各工艺参数和结构参数。
c.设计机体分级部分的结构及主要零件结构。
d.主要分级结构部分的主要零件强度和刚度,检查其加工工艺性和装配工艺性。
e.保证与其它部分的接口合理。
f.根据设计结果,修正设计参数。
本设计具有很大的实用价值。因为采用了很多新的结构,大大降低了制造和维护的费用,减少了机器调整的次数,保证了生产的连续性。

夹紧气缸部装图

手臂部装图

箱座

支架

轴套

下轴承座

下气爪