

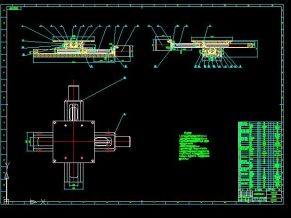
大臂电机盒
摘要:本文对仿人机器人构型的研究现状进行综述,分析了国内、外现有仿人机器人普遍采用的串联构型的特点;介绍了人体的结构,对关节、肢体构成与运动进行简化,建立人体的简化构型。提出了仿人机器人研究中存在的、需进一步研究的相关问题,针对问题提出了研究重点及未来发展方向。本课题设计的仿人机器人具有9个自由度,包括头部俯仰、肩关节转动与摆动、肘关节摆动和腕关节摆动。机器人关节是机器人的基础部件,其性能的好坏直接影响机器人的性能,本课题设计的仿人机器人关节处,利用步进电机经过一对直齿圆柱齿轮来传递动力,它具有结构简单、紧凑、传动稳定等优点。由于仿人型机器人的运动模型与人体的运动模型是不同的,所以捕获的人体的动作数据不能直接应用于仿人型机器人,需要通过运动学匹配将获取的人体动作数据转化为满足运动学约束的仿人型机器人运动数据。机器人上肢在空中运动,其运动学约束条件只包括关节范围及自由度的数目。该仿人机器人具有类似于人的各主要关节,能够完成步行和手臂简单舞蹈等基本动作功能。

电机支撑板

固定轴套

肩部连接板

肩部轴

前胸板

肘部连接板

肘部轴












")



")



