

0三维预览图(1)
本课题模拟了实际工业生产系统,课题将设计一个龙门机械手,将用于工作人员出入,使断开输送带上的零件通过机械手进行运输,需完成对工件的安全抓紧和释放,并将零件从输送带的一端送到指定位置的另一端生产线输送带上。
本文阐述了机械手的发展历史,国内外的应用状况,及其巨大的优越性,提出了具体的机械手设计要求和进行了总体方案设计和各自由度的具体结构设计、计算。
关键词:机械手;工业;传动;强度
Abstract
Industrialmanipulatoriscomposedoftargetofmodernmechanicalbody,controlsystem,sensorsystem,controlsystemandservoactuatorsystem,operation,automaticcontrol,akindofimitationofhumanmultipleprogramming,tocompletetheworkofeverykindofMechatronicsdeviceinthree-dimensionalspace.Industrialmachineryhandtoenhanceandensurethequalityofproducts,improveproductionefficiency,playsaveryimportantroleinimprovingtheworkingconditionsofworkersandtherapidupdatingofproduct.Industrialmachineryhandtechniquecombinedwithmultidisciplineknowledge.Includingmechanism,computer,controltheory,informationandsensortechnology,artificialintelligence,bionicsandsoon.Itistheveryactive,verywideapplicationareas.
Themanipulatorhasmanyhumanbeingsdonothave,includingtherapidanalysisofenvironmentalcapacity;stronganti-interferenceability,canworkforalongtimeandhighprecisionwork.Canbesaidthatthemanipulatorisaproductoftheprogressofindustry,italsoplaysavitalroleinthemodernindustry.Nowadays,industrialrobothasbecometheconcernoftheindustryallovertheworld.
ThissubjectcomesfromtheYalongYL-221automationtoflexibleproductionsystem,themachineindependentinnovationtrainingsystemtosimulatetheactualindustrialproductionsystem,accordingtothedifferentstagesofproductionmachineisprovidedwithapluralityofworkstation:automaticaccessoverheadwarehouse,handlingrobotstation,lineconveyor,conveyorstationstation90degreeturn,mechanicalprocessingstation,station,thestationcodeheap.
WedesignarobotwillbeusedinLongmen,staffentry,disconnectedtotheconveyorbeltpartsaretransportedbymechanicalhand,tothecompletionoftheworkofsafetygripandrelease,andthepartsfromoneendtotheotherendoftheconveyorbeltproductionlinepositionspecifiedontheconveyorbelt.
Thispaperexpoundsthedevelopmenthistoryofthemanipulator,theapplicationstatusathomeandabroad,anditsgreatsuperiority,putsforwardthedesignrequirementsofthemanipulatorspecificanddetailstructuredesign,overalldesignandvariousdegreesoffreedom.
KeyWords:robot;industrial;transmission;strength
目录
摘要1
Abstract 2
目录3
第一章绪论5
1.1机械手概念5
1.2课题研究的背景和意义6
1.3国内外机械手的研究7
1.4机械手的应用10
第二章总体方案结构设计12
2.1课题技术要求12
2.2设计原理12
第三章机架的设计15
3.1机架的设计要求15
3.2机架设计方案16
3.3机架尺寸结构16
第四章电动机联轴器及直线导轨设计19
4.1电动机的选型19
4.2联轴器设计20
4.3直线导轨设计22
第五章传动设计23
5.1 X轴方向23
5.1.1运动原理23
5.1.2轮齿部分主要几何尺寸的设计与校核24
5.2 Y轴方向27
5.2.1运动原理27
5.2.2轮齿部分主要几何尺寸的设计与校核28
5.3 Z轴方向30
5.3.1运动原理30
5.3.2轮齿部分主要几何尺寸的设计与校核31
5.4吸盘设计33
参考文献34
第一章绪论
1.1机械手概念
机械手(Robot)是自动执行工作的机器装置。它是高级整合控制论、机械电子、计算机、材料和仿生学的产物。在工业、医学、农业、建筑业甚至军事等领域中均有重要用途。
机械手是近50年才迅速发展起来的一种有代表性的、机械和电子控制系统组成的、自动化程度高的生产工具。在生产制造业中,机械手技术得到广泛的应用。它自动化程度高,对改善劳动条件,确保产品质量和提升工作效率,起到非常重要的作用。可以说他是现代工业的一种技术革命。械手概述工业机器人由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作,自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。特别适合于多品种、变批量的柔性生产。它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。
机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域。机器人应用情况,是一个国家工业自动化水平的重要标志。
机器人并不是在简单意义上代替人工的劳动,而是综合了人的特长和机器特长的一种拟人的电子机械装置,既有人对环境状态的快速反应和分析判断能力,又有机器可长时间持续工作、精确度高、抗恶劣环境的能力,从某种意义上说它也是机器的进化过程产物,它是工业以及非产业界的重要生产和服务性设各,也是先进制造技术领域不可缺少的自动化设备.机械手是模仿着人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。在工业生产中应用的机械手被称为“工业机械手”。

0三维预览图(2)

0三维预览图(3)

三维子文件

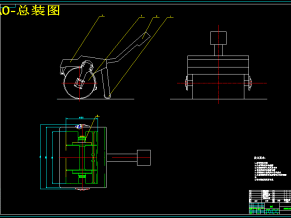
1-A0-总装配图

A0-X轴运动组装配图

A0-YZ轴运动组装配图

A0-机架(正式)

A0-吸盘

A1-X轴向从动轮

A1-X轴向主动轮

A1-Y轴向传动齿轮

A2-X导轨

A2-X轴向齿条

A2-Z轴向传动齿轮

字数统计
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!






![普通平口钳的设计[含CAD图纸和文档资料全套]](http://img.jixie5.com/d/file/2019/04/12/2450da77293630cb03fa0a1184143cf9.gif@!l)













")
![三自由度气动机械手搬运系统的设计与开发[机电PLC][西门子]【真空吸盘】【6张CAD图纸】](http://img.jixie5.com/d/file/2022/01/19/fa33e20389acc94cf31f1680f6025fb3.png@!l "三自由度气动机械手搬运系统的设计与开发[机电PLC][西门子]【真空吸盘】【6张CAD图纸】")
![球形工件气动机械手设计[机电PLC]真空吸盘](http://img.jixie5.com/d/file/2022/01/19/a4c4774a114520c98a1aa26170f895cb.png@!l "球形工件气动机械手设计[机电PLC]真空吸盘")


