plc
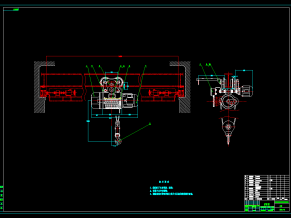
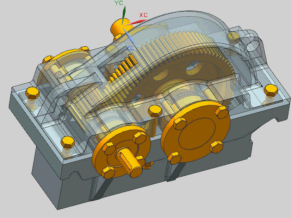
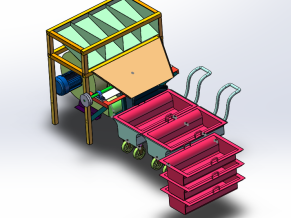
:很多国家在学校中开设了机器人技术的相关课程。为了培养开发、设计、生产、维护方面的人才,我国在大学校园也开设了机器人相关课程。教学型机械手就是针对教学研制的典型机器人设备,这对研究出良好的机械手将具有重要意义。我做出的PLC控制的教学型机器人具备以下特点:首先是教学适用性,符合教学使用的相关需求;其次是具有良好的性价比,特定的教学用户群决定了其价位不能过高;再次就是它的开放性和可扩展性,可以根据需要方便地增、减功能模块,进行自主创新。针对以上特点,对教学型机械手PLC控制系统进行了设计。首先介绍了可编程控制器在教学型机械手系统中的应用,简单介绍了教学型机械手总体结构及工作原理。根据系统需要完成的任务,比如夹取,松放等一系列动作,详细的介绍了教学型机械手PLC控制系统,包括PLC的选型,电气控制原理图的设计,输入输出点数的确定,线路的连接及程序的设计。经过多次实验,验证该机械手操作方便、性能稳定。
关键词:机械手;PLC;控制;编程

plc设计

程序

电气程序

目录