

Ш§ЮЌНиЭМ
БОДЮЩшМЦЕФжиаФЧ§ЖЏЪНЧђаЮЙіЖЏЛњЦїШЫВЩШЁЕФЗНшёЪЧЃКВЩгУЭтЙлЮЊдВаЮЕФПЧЬхзїЮЊЛњЦїШЫЕФжїЬхЃЌФкВПзАгажБСїЕчЛњЃЌЭЈЙ§ЕзВПЕФЕчЛњзЊЖЏДјЖЏЩЯВПЗжЕФЕчЛњзЊЖЏДгЖјжТЪЙЪЇжиАхЕФЧуаБДгЖјЪЙЕУЮвЕФЛњЦїШЫЕФдЫЖЏЙІаЇЕУвдЪЕЯж
вбжЊећИіжиаФЧ§ЖЏЪНЧђаЮЙіЖЏЛњЦїШЫЕФзмжиСП160KG,ЦфЫћжиСП40KGЃЌЮвУЧШЁзмжиСПЮЊ200KgЃЌвЦЖЏЫйЖШЮЊ1~2r/minЁЃ
ИљОнМЦЫуКЭЬиадЧњЯпвдМАЕчЛњЛљБОВЮЪ§БэЃЌЮвУЧбЁгУЕчЛњаЭКХЮЊ160BL-4030H1-LK-BЃЌЕчЛњЖюЖЈЙІТЪЮЊ0.1KWЃЌЖюЖЈзЊОиЮЊ7.62N.mЃЌзюИпЕФзЊОиЪЧ9N.mЃЌЖюЖЈЕФзЊЫйЪЧ3000r/min
еЊвЊ
ЛњЦїШЫЙЄвЕЪЧвЛИіЙњМвЕФживЊВњвЕЃЌЛњЦїШЫЙЄвЕЕФЗЂеЙЮоЪБВЛПЬЖМдкгАЯьзХЙњМвОМУЕФЗЂеЙЃЌШЫРрЕФНјВНРыВЛПЊЛњЦїШЫЙЄвЕЕФЗЂеЙЁЃдкШЋЧђОМУЗЂеЙЕФДѓЛЗОГЯТЃЌжаЙњИїИіаавЕБЛЦфЫћЙњМвЕФЯШНјММЪѕгАЯьЕФЭЌЪБЃЌдНРДдНЖрЕФЭтЙњЦѓвЕКЭЦЗХЦДЋВЅЕНжаЙњвбОГЩЮЊЯжЪЕЁЃдкаТЕФЪаГЁашЧѓЕФЭЦЖЏЯТЃЌЖджиаФЧ§ЖЏЪНЧђаЮЙіЖЏЛњЦїШЫНјааИФСМКЭгХЛЏЪЧЕБЮёжЎМБЁЃгажиаФЧ§ЖЏЪНЧђаЮЙіЖЏЛњЦїШЫбаОПЦѓвЕЖдИУЛњЦїШЫЕФАВШЋжИБъЕФгазХвЛЖЈЩњВњЕФбЯИёвЊЧѓЁЃдкЩњВњЛњЦїШЫЕФЦѓвЕЃЌГфЗжПМТЧЕНдкЛњЦїШЫдЫаажаПЩФмГіЯжЕФЮЪЬтЃЌДгЖјМѕЩйдыЩљЮлШОв§Ц№ЕФеёЖЏЛђВЛЕБВйзїЩшБИЕФЯжЯѓЕШЁЃЙњФкжиаФЧ§ЖЏЪНЧђаЮЙіЖЏЛњЦїШЫЕФбаЗЂМАжЦдьвЊгыШЋЧђКХейЕФИпаЇОМУЁЂАВШЋЮШЖЈжїЬтБЃГжвЛжТЁЃжиаФЧ§ЖЏЪНЧђаЮЙіЖЏЛњЦїШЫЕФЗЂеЙгыШЫРрЩчЛсЕФНјВНКЭПЦбЇММЪѕЕФЫЎЦНУмЧаЯрЙиЁЃ
БОЮФдЫгУДѓбЇЫљбЇЕФжЊЪЖЃЌЬсГіСЫжиаФЧ§ЖЏЪНЧђаЮЙіЖЏЛњЦїШЫЕФНсЙЙзщГЩЁЂЙЄзїдРэвдМАжївЊСуВПМўЕФЩшМЦжаЫљБиаыЕФРэТлМЦЫуКЭЯрЙиЧПЖШаЃбщЃЌЙЙНЈСЫжиаФЧ§ЖЏЪНЧђаЮЙіЖЏЛњЦїШЫзмЕФжИЕМЫМЯыЃЌДгЖјЕУГіСЫИУжиаФЧ§ЖЏЪНЧђаЮЙіЖЏЛњЦїШЫЕФгХЕуЪЧИпаЇЃЌОМУЃЌдЫааЦНЮШЕФНсТлЁЃ
ЙиМќДЪЃКжиаФЧ§ЖЏЪНЧђаЮЙіЖЏЛњЦїШЫЃЛНсЙЙЃЛЙіЖЏЃЛОМУ
ФПТМ
еЊвЊi
ABSTRACT ii
ФПТМiii
1аїТл1
1.1ПЮЬтРДРњгыбаОПЕФФПЕФвдМАвтвх1
1.2ЛњЦїШЫЗЂеЙИХПі4
1.3БОПЮЬтбаОПЕФФкШн6
1.4 SolidworksЩшМЦЛљДЁ8
1.4.1ВнЭМЛцжЦ9
1.4.2ЛљзМЬиеїЃЌВЮПММИКЮЬхЕФДДНЈ10
1.4.3РЩьЁЂа§зЊЁЂЩЈУшКЭЗХбљЬиеїНЈ10
1.4.4ЙЄГЬЭМЕФЩшМЦ10
1.4.5зАХфЩшМЦ11
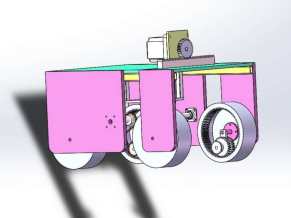
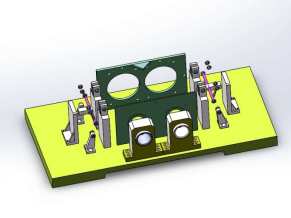
2жиаФЧ§ЖЏЪНЧђаЮЙіЖЏЛњЦїШЫзмЬхЗНшёНсЙЙЕФЩшМЦ12
2.1жиаФЧ§ЖЏЪНЧђаЮЙіЖЏЛњЦїШЫЛњЙЙЕФзмЬхЗНшёЭМ12
3ЛњаЕДЋЖЏЕФЩшМЦМЦЫу17
3.1жБСїЫХЗўЕчЛњЕФбЁаЭМЦЫу18
3.2ДЋжсЕФЩшМЦМЦЫу19
3.3жсГаЕФЩшМЦМЦЫу20
НсТл20
жТаЛ21
ВЮПМЮФЯз22
ИНТМвЛ23
ИНТМЖў28

A0-жиаФЧ§ЖЏЪНЧђаЮЙіЖЏЛњЦїШЫ

A3-СЌНгжс

A3-ЪЕжиАх

A3-жЇМм

A4-ДЋЖЏжс

A4-ЙіТж

A4-жсГазљ1

A4-жсГазљ2
ЩъУїЃКФкШнРДздгУЛЇЩЯДЋЃЌжјзїШЈЙщдзїепЫљгаЃЌШчЩцМАЧжШЈЮЪЬтЃЌЧыгыЮвУЧСЊЯЕЃЌЮвУЧНЋМАЪБДІРэЃЁ












")
")

")

")


