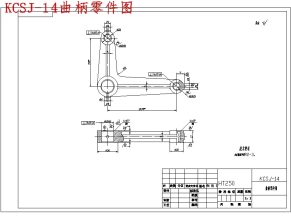
змзАЭМ
ЙиНкЪНЮяСЯАсдЫЛњаЕЪжЩшМЦ
еЊвЊ
ИљОнЯжДњЙЄвЕздЖЏЛЏЕФвЊЧѓЃЌБОПЮЬтЩшМЦСЫеыЖддкЮяСЯАсдЫЙ§ГЬжаЕФЙиНкЪНЮяСЯАсдЫЛњаЕЪжЁЃжївЊНјааСЫЛњаЕЪжЕФећЬхЕФНсЙЙЩшМЦЃЌЪжБлВПЗжЕФЧПЖШаЃКЫЃЌЧ§ЖЏЕчЛњЕФбЁаЭЃЌЪжВПзЅШЁНсЙЙЕФЩшМЦЁЃ
БОДЮЩшМЦЕФЛњаЕЪжНсЙЙМђЕЅЃЌЖЏзїСщЛюЁЃдкИїДІЙиНкОљЪЙгУНЛСїЫХЗўЕчЛњКЭаГВЈМѕЫйЦїзщКЯЕФаЮЪННјааЧ§ЖЏЃЌВФСЯбЁдёТСКЯН№ЃЌТСКЯН№жЪСПНЯЧсЕФЭЌЪБЛЙгЕгаНЯКУЕФЧПЖШИеЖШЁЃНсЙЙМђЕЅШнвзЮЌаоЧвНЕЕЭСЫГЩБОЃЌЭЌЪБгаНЯКУЕФИКдиФмСІЁЃЕззљЩшМЦВЩгУдВжљаЮЩшМЦЃЌМѕЩйЛњаЕБлЕФеМЕиЁЃзЅГжВПЗжВЩгУММЪѕвбОГЩЪьЕФЦјЖЏЛњаЕзІЃЌБЃжЄЖдЮяСЯНјаагааЇЕизЅГжЁЃДЫДЮЩшМЦПижЦЯЕЭГбЁдёЪЙгУPLCКЭНЛСїЫХЗўЧ§ЖЏЛьКЯПижЦЕФаЮЪНЁЃ
ЙиМќДЪЃКЛњаЕЪжЃЛдЫЪфЮяСЯЃЛЫХЗўЃЛPL
ФПТМ
еЊвЊI
ABSTRACT II
Ек1еТв§бдЃБ
1.1баОПФПЕФМАвтвхЃБ
1.2ЛњаЕЪжЕФРњЪЗЁЂЯжзДЃВ
1.3баОПЕФжївЊФкШнЃВ
ЕкЖўеТАсдЫЛњаЕЪжЕФзмЬхЗНАИЩшМЦЃД
2.1АсдЫЛњаЕЪжЕФЩшМЦвЊЧѓЃД
2.2ЛњаЕЪжЩшМЦЕФЫМТЗЗжЮіЃД
2.3змЬхЩшМЦПђЭМЃД
2.4ЛљБОЩшМЦВЮЪ§ЃЕ
2.5ЛњаЕЪжзщГЩКЭНсЙЙЩшМЦЃЖ
2.6Ч§ЖЏЗНЪНбЁдёЃЗ
2.7ПижЦЯЕЭГЕФбЁдёЃЗ
2.8ЛњаЕЪжЕФбЁдёЃЗ
ЕкШ§еТНсЙЙЩшМЦгыМЦЫуЃИ
3.1Ч§ЖЏКЭДЋЖЏЯЕЭГЕФзмЬхНсЙЙЩшМЦЃИ
3.2ЦјЖЏЪжзІЕФбЁаЭМЦЫуЃЙ
3.3ЪжзІЦјИзЩшМЦМЦЫуЃБЃБ
3.4Ч§ЖЏЕчЛњЕФбЁаЭМЦЫуЃБЃВ
3.4.1ЪжзІа§зЊЕчЛњЕФбЁаЭМЦЫуЃБЃВ
3.4.2аЁБлЧ§ЖЏЕчЛњЕФЯрЙиМЦЫуЃБЃЕ
3.4.3ДѓБлЧ§ЖЏЕчЛњЕФЯрЙиМЦЫуЃБЃЗ
3.4.4МчВПЛизЊЕчЛњЃБЃЙ
3.5ЪжБлЧПЖШаЃКЫЃБЃЙ
3.6жЦЖЏЦїЃВЃБ
ЕкЫФеТПижЦЯЕЭГЕФбЁдёЃВЃБ
4.1ПижЦЯЕЭГЗжРрЃВЃВ
4.2ПижЦЯЕЭГЗНАИЗжЮіЃВЃВ
4.3ЯЕЭГПижЦЗНАИШЗЖЈЃВЃВ
4.4PLCМАПижЦЕЅдЊбЁаЭЃВЃД
ЕкЮхеТНсТлгыеЙЭћЃВЃЕ
5.1НсТлЃВЃЕ
5.2еЙЭћЃВЃЕ
жТаЛЃВЃЖ

ДѓБлA1

аЁБлA1

аЁБлA2

ЛњаЕЪжЪжжИA4

ЛњаЕЪжжИГнЬѕ

ЛњаЕЪжжЇзљA4

ЗЈРМХЬA4

бќВПа§зЊЙиНкаГВЈМѕЫйЦїA4

СЌНгжсA4

ЪжзІA2

ЩшМЦЫљАќКЌЮФМў

зжЪ§

еЊвЊ

ФПТМ
ЩъУїЃКФкШнРДздгУЛЇЩЯДЋЃЌжјзїШЈЙщдзїепЫљгаЃЌШчЩцМАЧжШЈЮЪЬтЃЌЧыгыЮвУЧСЊЯЕЃЌЮвУЧНЋМАЪБДІРэЃЁ