

三维模型
光伏太阳能板清洗机器人可在倾斜的光伏板上进行表面的清洗,本文设计的机器人系统由移动系统和吸附系统组成。移动吸附系统由十字框架结构和真空吸附结构组成,使机器人灵活移动,避障能力强。机器人主体部分由可以相互平移的两个呈十字型组合的无杆气缸,其中任意一个无杆气缸可以相对另一个进行平移,每个无杆气缸通过腿部支架可独立控制腿足结构。腿足结构是由拉杆气缸和一组真空吸盘组成。随着腿部的交替吸附和框架主体的相对运动,机器人实现壁面自由移动的功能。驱动方式由X方向和Y方向两个相互垂直的机构组成,分别选用一个双作用无杆气缸,安置在中间的主体支架上,真空吸盘组采用正三角排列和使用气动的驱动方式。控制系统是清洗机器人的关键部分,采用三菱公司的PLC-FX1N系列完成对机器人主体的吸盘脱离、本体移动、吸盘吸附和清洗的控制。

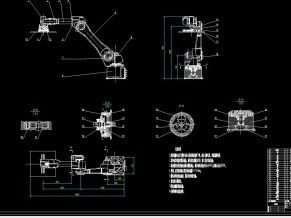
X向支架

X轴向移动支架

传动箱

气动回路

吸盘固定板

总装图














")

及操作视频")

")
")
")
