PLCЭтВПНгЯпЭМ
АсдЫЛњаЕЪжЪЧЙЄвЕЛњЦїШЫЯЕЭГжаДЋЭГЕФШЮЮёжДааЛњЙЙЃЌЪЧЛњЦїШЫЕФЙиМќВПМўжЎвЛЁЃАсдЫЛњаЕЪжЕФЛњаЕНсЙЙВЩгУЙіжщЫПИЫЁЂЛЌИЫЁЂЕШЛњаЕЦїМўзщГЩЃЛЕчЦјЗНУцгаНЛСїЕчЛњЁЂБфЦЕЦїЁЂДЋИаЦїЁЂЕШЕчзгЦїМўзщГЩЁЃИУзАжУКИЧСЫПЩБрГЬПижЦММЪѕЃЌЮЛжУПижЦММЪѕЁЂМьВтММЪѕЕШЃЌЪЧЛњЕчвЛЬхЛЏЕФЕфаЭДњБэвЧЦїжЎвЛЁЃБОЮФНщЩмЕФАсдЫЛњаЕЪжЪЧгЩPLCЪфГіШ§ТЗТіГхЃЌЗжБ№Ч§ЖЏКсжсЁЂЪњжсБфЦЕЦїЃЌПижЦАсдЫЛњаЕЪжКсжсКЭЪњжсЕФОЋШЗЖЈЮЛЃЌЮЂЖЏПЊЙиНЋЮЛжУаХКХДЋИјPLCжїЛњЃЛЮЛжУаХКХгЩНгНќПЊЙиЗДРЁИјPLCжїЛњЃЌЭЈЙ§НЛСїЕчЛњЕФе§ЗДзЊРДПижЦАсдЫЛњаЕЪжЪжзІЕФеХКЯЃЌДгЖјЪЕЯжАсдЫЛњаЕЪжОЋШЗдЫЖЏЕФЙІФмЁЃБОПЮЬтФтПЊЗЂЕФЮяСЯАсдЫЛњаЕЪжПЩдкПеМфзЅЗХЮяЬхЃЌЖЏзїСщЛюЖрбљЃЌПЩДњЬцШЫЙЄдкИпЮТКЭЮЃЯеЕФзївЕЧјНјаазївЕЃЌВЂПЩИљОнЙЄМўЕФБфЛЏМАдЫЖЏСїГЬЕФвЊЧѓЫцЪБИќИФЯрЙиВЮЪ§ЁЃ
БОЮФдкзнЙлСЫНќФъРДАсдЫЛњаЕЪжЗЂеЙзДПіЕФЛљДЁЩЯЃЌНсКЯАсдЫЛњаЕЪжЗНУцЕФЩшМЦЃЌЖдАсдЫЛњаЕЪжММЪѕНјааСЫЯЕЭГЕФЗжЮіЃЌЬсГіСЫгУЧ§ЖЏКЭPLCПижЦЕФЩшМЦЗНАИЁЃВЩгУећЬхЛЏЕФЩшМЦЫМЯыЃЌГфЗжПМТЧСЫШэЁЂгВМўИїздЕФЬиЕуВЂНјааЛЅВЙгХЛЏЁЃЖдАсдЫЛњаЕЪжЕФећЬхНсЙЙЁЂжДааНсЙЙЁЂЧ§ЖЏЯЕЭГКЭПижЦЯЕЭГНјааСЫЗжЮіКЭЩшМЦЁЃдкЦфЧ§ЖЏЯЕЭГжаВЩгУЧ§ЖЏЃЌПижЦЯЕЭГжабЁдёPLCЕФПижЦЕЅдЊРДЭъГЩЯЕЭГЙІФмЕФГѕЪМЛЏЁЂАсдЫЛњаЕЪжЕФвЦЖЏЁЂЙЪеЯБЈОЏЕШЙІФмЁЃзюКѓЬсГіСЫвЛжжМђЕЅЁЂвзгкЪЕЯжЁЂРэТлвтвхУїШЗЕФПижЦВпТдЁЃ
ЭЈЙ§вдЩЯВПЗжЕФЙЄзїЃЌЕУГіСЫОМУаЭЁЂЪЕгУаЭЁЂИпПЩППаЭАсдЫЛњаЕЪжЕФЩшМЦЗНАИЃЌЖдЦфЫћОМУаЭPLCПижЦЯЕЭГЕФЩшМЦвВгавЛЖЈЕФНшМјМлжЕЁЃ

ГѕЪМЛЏМАБЈОЏГЬађ

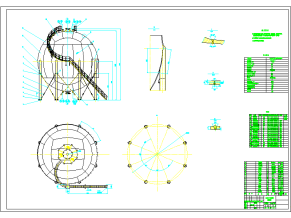
ЪжЖЏГЬађ

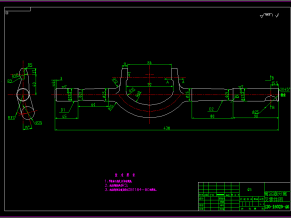
ЫЕУїЪщ2

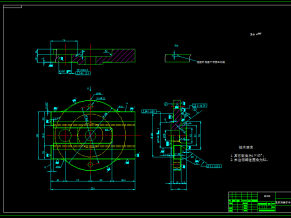
ЫЕУїЪщ3

зДЬЌзЊвЦЭМ

здЖЏГЬађЬнаЮЭМ

змГЬађНсЙЙПђЭМ
ЩъУїЃКФкШнРДздгУЛЇЩЯДЋЃЌжјзїШЈЙщдзїепЫљгаЃЌШчЩцМАЧжШЈЮЪЬтЃЌЧыгыЮвУЧСЊЯЕЃЌЮвУЧНЋМАЪБДІРэЃЁ




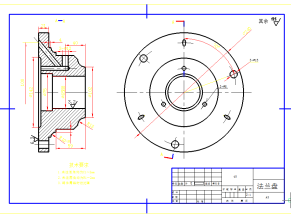




![ЗЈРМХЬ[831004]8-ЯГОржааФ34,24СНУцЩшМЦ](http://img.jixie5.com/d/file/2019/01/19/f18a7315870c7519ec5873d995486888.png@!l)